
Las IA de conducción autónoma tienen problemas para detectar a los peatones de piel oscura

Investigadores del Kings College de Londres analizaron los datos recopilados por la IA de un sistema de conducción autónoma, y llegaron a una llamativa conclusión. La reacción frente a personas con piel oscura, y los niños, era peor que frente a los peatones con piel clara.
El estudio ha tenido en cuenta el análisis de más de 8.000 imágenes, y ha concluido con que el sistema de detección de peatones impulsado por IA utilizado por los coches autónomos tiene una precisión de detección un 19,67% menor para niños que para adultos, y una precisión de detección de piel oscura es un 7,53% menor que la de piel clara.
Por su parte, el género tiene poca diferencia en la precisión de la detección, con solo una brecha del 1,1% entre hombres y mujeres.
Esto significa que los niños y los peatones de piel oscura, según los datos obtenidos, son más difíciles de detectar para los vehículos autónomos que los adultos y los peatones de piel clara.
La pregunta es por qué. Primero echemos un vistazo al proceso del experimento. En este caso, el equipo de investigación utilizó un método de análisis de datos donde analizó 8 sistemas de detección específicos de peatones que son los más utilizados por las empresas de conducción autónoma y también son comunes en el mercado.
Estos sistemas de detección de peatones se utilizan luego para recopilar datos de prueba de condiciones reales, incluidas escenas con diferente intensidad de brillo ambiente, contraste, condiciones climáticas, etc. Estos conjuntos de datos se componen principalmente de imágenes de calles reales.
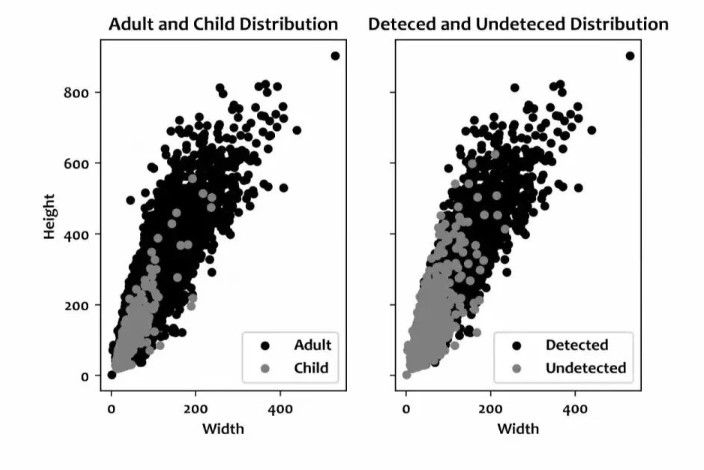
En total se obtuvieron 8.311 imágenes en cuatro escenas reales, que mostraban a peatones en diferentes posiciones, tamaños y escenarios. Los investigadores también añadieron etiquetas especialmente a los peatones en las imágenes, con un total de 16.070 etiquetas de género, 20.115 etiquetas de edad y 3.513 etiquetas de color de piel.
El objetivo de la investigación es saber si el sistema de detección de peatones de la conducción autónoma responde igual ante diferentes peatones, especialmente si habrá problemas en los tres factores de género, edad y color de piel.
Los sistemas de detección utilizados incluyen ALFNet, CSP, MGAN y PRNet, entre los cuales ALFNet utiliza predicción de múltiples pasos para el posicionamiento asintótico, lo que resuelve las limitaciones de la detección de un solo paso en la detección de peatones.
CSP introduce un método sin anclajes al ubicar el centro y escalar a los peatones; MGAN usa información del cuadro delimitador del área visible para guiar la generación de atención y se usa principalmente para la detección de peatones bajo oclusión.
Después de recopilar las imágenes, el equipo utilizó una fórmula para deyterminar si el sistema de conducción autónoma era injusto para algún grupo. MR generalmente representa el indicador de rendimiento más utilizado en la investigación de detección de peatones, MR=1-TP/(TP+FN) , donde TP (verdadero positivo) se refiere al número de cuadros delimitadores de verdad terrestre eliminados con éxito, FN (falso negativo) es el número de cuadros delimitadores de verdad fundamental no detectados.
Después del cálculo, la tasa de fallo del detector de peatones para peatones femeninos y masculinos es similar, con una diferencia del 1,1%. Sin embargo, la diferencia en edad y color de piel es mayor, ¡alcanzando el 19,67% y el 7,52% respectivamente.
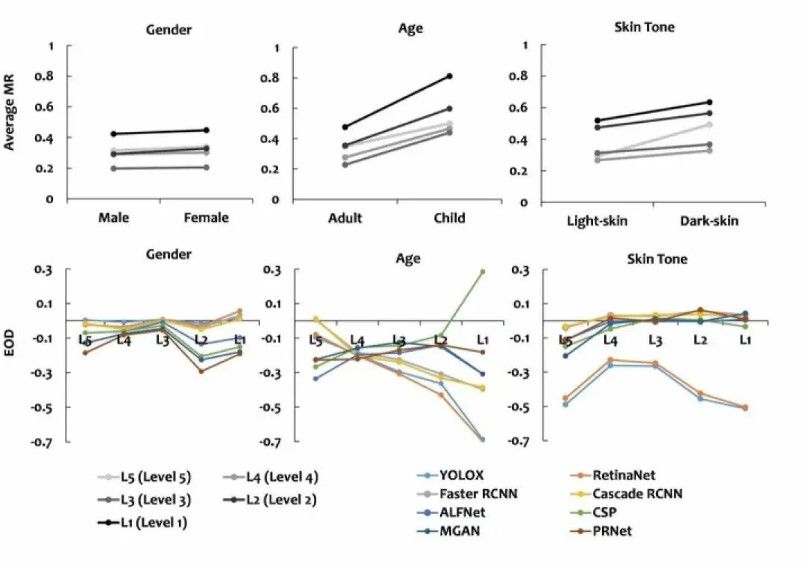
Lo que es particularmente notable es que estas cifras aumentan en cierta medida durante la noche: la EOD (diferencia entre niños y adultos) de los niños aumenta de día a noche, y la tasa de diferencia aumenta del 22,05% al 26,63% . El grupo de color de piel (oscuro y piel clara) la tasa de diferencia aumentó del 7,14% durante el día al 9,68% durante la noche.
Además, en comparación con los hombres, las mujeres tienen mayores tasas de detección errónea en los tres factores que los hombres, a lo que se añade que el equipo de investigación estudió los datos bajo diferentes condiciones de brillo y contraste, y estas variables también tienen un gran impacto en la tasa de detección falsa.
¿Qué tecnología será la mejor para los futuros coches autónomos?

El sistema autónomo puede identificar las condiciones de la carretera de diversas formas, como por ejemplo, con un sensor Lidar que puede generar imágenes tridimensionales del entorno circundante del automóvil utilizando principalmente pulsos de láser infrarrojo para reflejar objetos y transmitir señales que le permiten detectar objetos tanto estacionarios como en movimiento.
Sin embargo, cuando se encuentre con condiciones climáticas extremas, como niebla densa o lluvia intensa, la precisión del Lidar se reduce considerablemente.
Las cámaras ópticas de corto y largo alcance pueden leer señales y determinar el color de objetos y otros objetos más detallados, lo que puede compensar las deficiencias del Lidar.

Para aumentar su capacidad de reconocimiento, muchos sistemas de conducción no tripulados han adoptado una ruta de percepción híbrida. Estas utilizan un radar láser y tecnología de visión con cámara, y la percepción visual tiene prioridad sobre la percepción del radar, con la percepción visual como principal y la percepción por radar como complemento.
Otros como Tesla han optado por un formato solo de visión, e incluso Elon Musk llegó a desdeñar el rendimiento de los sensores Lidar. Sin embargo, los diferentes indecentes protagonizados por los modelos de Tesla han supuesto un quebradero de cabeza para el fabricante americano.
Fuente | Kings College

