Motores eléctricos de inducción vs motores de corriente continua


17 min. lectura
Publicado: 14/03/2014 12:26
¿Cual es el mejor motor para un coche eléctrico, de inducción o de corriente continua? ¿Cuáles son las ventajas y desventajas de cada uno de ellos? ¿Cuáles triunfarán en el futuro? La decisión no es trivial y conocer mejor el funcionamiento de cada uno de ellos ayuda a ver sus diferencias, sus ventajas y sus inconvenientes.
Este artículo es una traducción adaptada de la entrada en el blog de Tesla «Inducción Versus DC Brushless Motors» escrita por Wally Rippel en 2007 cuando era ingeniero para la empresa californiana. El articulo me parece una excelente explicación de las diferencias entre los diferentes motores que podemos encontrar en vehículos eléctricos y creo que merece la pena traducirlo al español.
Wally Rippel es un veterano defensor de los vehículos eléctricos. En 1968, cuando todavía era estudiante universitario en Caltech, construyó un coche eléctrico (en realidad realizó una conversión de una furgoneta Volkswagen de 1958) y ganó el Great Transcontinental Electric Car Race compitiendo contra el prestigioso centro de ingenieros MIT. Esta es tan solo una anecdota en el curriculum de Rippel.

Antes de unirse a Tesla Motors en 2006, era ingeniero en AeroVironment, donde ayudó a desarrollar el EV1 de General Motors. De hecho aparece en la película documental ¿Quién mató al coche eléctrico?. Wally Rippel ha trabajado para el Laboratorio de Propulsión a Chorro de la NASA y posteriormente en Tesla Motors. En 2008 Rippel abandonó el equipo de Tesla para regresar a AC Propulsion, la compañía que fundó en 1992 junto a Alan Cocconi. Más de 20 importantes patentes relacionadas con baterías y sistemas de tracción eléctricos están firmadas por Rippel.

En este mundo odioso de los vehículos impulsados por gas, los motores no son todos iguales. Hay cabezas de cilindros planas o hemisféricas, motores de cilindros en recto, opuestos o en V… y así numerosas posibilidades. Uno podría pensar que hace tiempo que alguien debería haber descubierto qué era lo mejor. Eso habría acabado con tantas opciones y así sólo el mejor tipo de motor estaría en producción. Pero no es así. No es así porque no hay un mejor tipo de motor, más bien hay diferentes tipos de motores que se adaptan a las necesidades particulares de cada aplicación, como pueden ser el precio y el rendimiento. Esto también es cierto para los vehículos eléctricos.
Antes se usaban las baterías de plomo, los motores con escobillas y los controladores del contactor. Hoy en día, ninguno de ellos se mantiene. El plomo ha sido reemplazado por litio y los motores de corriente continua con escobillas por otros de corriente continua sin escobillas o de inducción.
Los contactores, por su parte, han dado paso a la modulación de los inversores. ¿Es posible que alguno de estos elementos también se vuelva obsoleto en un futuro próximo o puede que alguno llegue a mantenerse? Sin una buena bola de cristal, es difícil predecir el futuro. Sin embargo, es posible que veamos tanto los motores de inducción y los motores sin escobillas aferrarse a sus respectivas aplicaciones con uñas y dientes durante muchos años. Cada cual tendrá sus partidarios así como sus detractores.

Entonces, ¿qué son estas dos tecnologías? ¿Cómo funcionan? ¿Qué las diferencia y qué tienen en común? Vamos a empezar por las unidades de corriente continua (CC) sin escobillas.
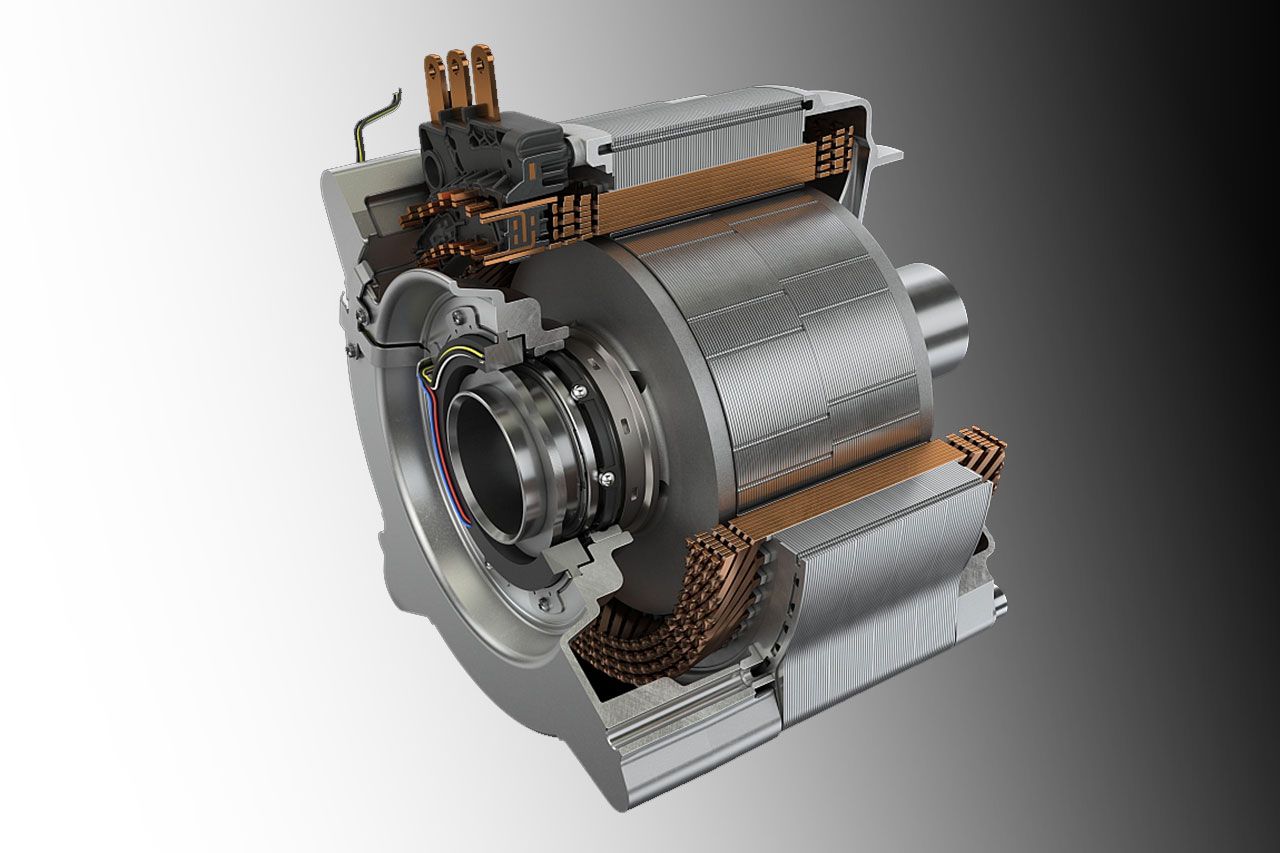
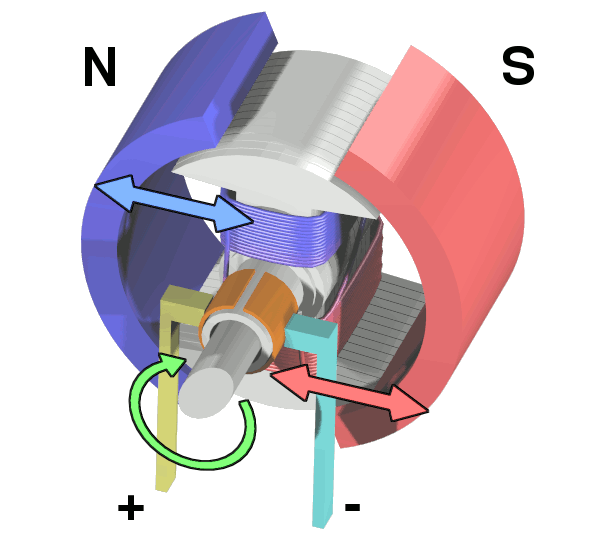
En los motores sin escobillas el rotor incluye dos o más imanes permanentes que generan un campo magnético de CC (como se ve desde el punto de vista del rotor). A su vez, este campo magnético entra en el núcleo del estator (un núcleo compuesto por finas laminas apiladas) e interactúa con las corrientes que fluyen dentro de la bobina para producir una interacción de par entre el rotor y el estator.
A medida que el rotor gira, es necesario que la magnitud y la polaridad de las corrientes del estator varíen continuamente – y en la manera correcta – de tal forma que el par de torsión permanezca constante y la conversión de energía mecánica a eléctrica sea la más eficiente. El aparato que proporciona este control de la corriente es el inversor. Sin él los motores sin escobillas son motores inútiles.

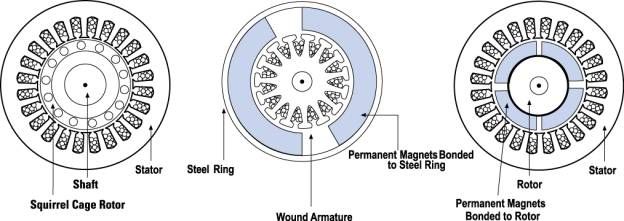
Vamos a pasar al funcionamiento del motor de inducción. Un precursor del motor de inducción de 3 fases fue inventado por Nikola Tesla en algún momento antes de 1889. Curiosamente, los estatores del motor de inducción de 3 fases y el motor de corriente continua sin escobillas son prácticamente idénticos. Ambos tienen tres conjuntos de bobinas o «devanados» que se insertan en el núcleo del estator. La diferencia esencial entre las dos máquinas está en el rotor.
A diferencia del rotor de corriente continua sin escobillas, el rotor de inducción no tiene imanes. En su lugar tiene simples laminas de metal apiladas y conectadas con conductores periféricos que forman una «jaula de ardillas» (por su parecido a las ruedas donde corren los roedores enjaulados). Las corrientes que fluyen en los devanados del estator producen un campo magnético giratorio que entra en el rotor.
La frecuencia de este campo magnético como «vista» por el rotor es igual a la diferencia entre la frecuencia eléctrica aplicada y la «frecuencia» de rotación del propio rotor. En consecuencia, existe una tensión inducida a través de la «jaula de ardillas» que es proporcional a esta diferencia de velocidad entre el rotor y la frecuencia eléctrica. En respuesta a esta tensión, se producen corrientes dentro de los del rotor que son aproximadamente proporcionales a la tensión y también lo son, por lo tanto, a la diferencia de velocidad. Finalmente, estas corrientes interactúan con el campo magnético original para producir fuerzas, un componente de las cuales es el deseado par motor.

Cuando un motor de inducción de 3-fases está conectado a una línea trifásica el par se produce desde el principio, el motor tiene la capacidad de arrancar con solo ser enchufado, no se necesita ningún inversor. De haberse necesitado un inversor el invento de Tesla habría sido inútil hasta algún momento de la década de 1960. El hecho de que los motores de inducción son directamente compatibles con la red eléctrica convencional es la principal razón de su éxito. En contraste, un motor de corriente continua sin escobillas no produce ningún par de arranque cuando se conecta directamente a la red eléctrica de frecuencia fija. Los motores de corriente continua necesitan de la ayuda de un inversor cuyas «fase» se mantiene en sincronización con la posición angular del rotor.
Mientras que los motores de inducción trifásicos tienen grandes ventajas, también tienen algunas graves limitaciones. La más clara es que no pueden operar con corriente continua, necesitan corriente alterna. Por otro lado como la velocidad del eje es proporcional a la frecuencia de la fuente cuando se conectan a la red son máquinas de velocidad constante y poseen un limitado par de arranque, así como un par máximo un tanto bajo en comparación con las máquinas de CC.
Al añadir un inversor (sin ningún control de realimentación) se hace posible alimentar una máquina de inducción (de corriente alterna) con una batería u otra fuente de CC; también se hace posible tener una velocidad variable simplemente ajustando la frecuencia del inversor. Sin embargo, el rendimiento de par es bajo en comparación con las máquinas de corriente continua. Al agregar un poco de retroalimentación de tal manera que el inversor produce la frecuencia exacta que el rotor «quiere» el motor de inducción es capaz de competir con DC y DC sin escobillas para aplicaciones en vehículos eléctricos.
¿Sin escobillas o inducción?
De vuelta a la década de 1990 todos los vehículos eléctricos, excepto uno, funcionaban con unidades de CC sin escobillas. Hoy en día (hablando de 2007), todos los híbridos son impulsados por unidades CC sin escobillas, sin excepciones. Los únicos usos notables de las unidades de inducción han sido el EV-1 de General Motors y los vehículos con motores de la empresa AC Propulsion donde se incluyen el Tzero y el Tesla Roadster.
Tanto de corriente continua sin escobillas e inducción utilizan motores que tienen estatores similares. Y ambas unidades utilizan inversores de modulación de 3 fases. Las únicas diferencias están en los rotores y en los controles del inversor. Y en el caso de controladores digitales, la única diferencia es el código de control, ya que las unidades de CC sin escobillas requieren un sensor de posición absoluta, mientras que las unidades de inducción requieren sólo un sensor de velocidad; estas diferencias son relativamente pequeñas.
Una de las principales diferencias es que el calor que genera el rotor con la unidad de corriente continua sin escobillas es mucho menor. La refrigeración del rotor es más fácil y eficiencia máxima es generalmente más alta para este tipo de unidad. La unidad de corriente continua sin escobillas también puede operar con un factor de potencia 1, mientras que el mejor factor de potencia de la unidad de inducción es de aproximadamente 0.85. Esto significa que la eficiencia energética máxima para una unidad de corriente continua sin escobillas será típicamente unos pocos puntos porcentuales superior a la de una unidad de inducción.
En una unidad sin escobillas ideal la fuerza del campo magnético producido por los imanes permanentes sería ajustable. Cuando se requiere un par máximo, especialmente a bajas velocidades, la fuerza del campo magnético (B) debe ser máximo, de modo que las corrientes del inversor y del motor se mantienen a sus valores más bajos posibles. Esto minimiza las pérdidas (I² R – corriente al cuadrado por resistencia) y de ese modo optimiza la eficiencia. Del mismo modo, cuando los niveles de par son bajos, el campo magnetico debe ser reducido de tal manera que las pérdidas debidas a las corrientes de Foucault y a la histéresis también se reduzcan. Idealmente B debe ser ajustado de tal manera que la suma de las pérdidas por las corrientes de Foucault, histéresis e I² se reduzcan al mínimo. Desafortunadamente, no hay una manera sencilla de cambiar la magnitud de B con imanes permanentes.
En contraste, los motores de inducción no tienen imanes y los campos magnéticos son «ajustables», ya que B es proporcional a V/f (tensión entre frecuencia). Esto significa que en cargas ligeras el inversor puede reducir la tensión de tal manera que las pérdidas magnéticas se reducen y se maximiza la eficiencia. Por lo tanto, la máquina de inducción cuando se opera con un inversor inteligente tiene una ventaja sobre una máquina de corriente continua sin escobillas – las pérdidas magnéticas y de conducción pueden ser tratadas de tal manera que se optimiza la eficiencia.
Esta ventaja se vuelve cada vez más importante a medida que aumenta el rendimiento. Con el motor de corriente continua sin escobillas las pérdidas magnéticas aumentan proporcionalmente con el tamaño de la máquina, y la eficiencia para cargas parciales disminuye. Con la inducción, las pérdidas no crecen necesariamente con el tamaño de la máquina. Por lo tanto, las unidades de inducción pueden ser el enfoque preferido en donde se desea de alto rendimiento; aunque la eficiencia máxima será un poco menor que con motores de corriente continua sin escobillas, la eficiencia media en realidad puede ser mejor.
Por otro lado esta la cuestión del precio, en lo que parece ser el motor de inducción el claro ganador. Los imanes permanentes son caros, algo así como 50 dólares por kilogramo (este dato es de 2007, el precio depende de metales raros como el neodimio). Los rotores de imán permanente son además difíciles de manejar debido a las fuerzas, muy grandes, que entran en juego cuando algo metálico se acerca a ellos.
Esto significa que los motores de inducción probablemente mantendrán una ventaja de costos sobre las máquinas de imán permanente. Además, debido a la capacidad de debilitamiento de campo de las máquinas de inducción, los requisitos para el inversor y por lo tanto los costes parecen ser más bajos, en especial para las unidades de alto rendimiento. Ya que la maquinas de inducción en funcionamiento producen poca o ninguna tensión cuando se deja de suministrar corriente son más fáciles de proteger.
Pero las máquinas de inducción son más difíciles de controlar, las leyes que las gobiernan son más complejas y difíciles de entender. Lograr estabilidad en todo el rango de par-velocidad en función de la temperatura es más difícil con las de inducción que con las de corriente continua sin escobillas. Esto supone un mayor costes de desarrollo, pero probablemente menores gastos a largo plazo.

No hay ganador
En conclusión las unidades de CC sin escobillas probablemente seguirán dominando en los híbrido y en híbridos enchufables en el mercado, mientras que las unidades de inducción es probable que mantengan el dominio para sistemas eléctrico puros de alto rendimiento. La pregunta es ¿qué va a pasar cuando los híbridos tengan mayor rango eléctrico y los niveles de rendimiento de sus motores eléctricos aumenten? El hecho de que gran parte del hardware es común para ambas unidades podría significar que vamos de inducción y de corriente continua sin escobillas trabajan codo a codo durante la próxima época de oro de los vehículos híbridos y eléctricos.
Como he dicho al principio este texto es una adaptación del original y pido disculpas si algo no está bien traducido o si alguna de las aclaraciones introducidas por mi no son del todo correctas.
Fuente | Tesla