
Así funciona y optimiza Google Maps las rutas de los coches eléctricos

Google Maps se está modernizando y adaptando a las necesidades y retos que ofrece la nueva movilidad derivada de la expansión del coche eléctrico. Tras la inclusión paulatina de las redes de carga disponibles en cada país, como la reciente inclusión de la española Cargacoches, ahora el método de cálculo del sistema cambia radicalmente para adaptarse los viajes en coches eléctricos.
Los algoritmos de mapeo utilizados para la navegación a menudo se basan en el algoritmo de Dijkstra, una solución para encontrar rutas más cortas en los gráficos. El algoritmo de Dijkstra es simple y elegante, en lugar de considerar todas las rutas posibles (un número exponencial), mejora iterativamente una solución inicial y funciona en tiempo polinómico.
El algoritmo original y las extensiones prácticas del mismo (como el algoritmo A*) se utilizan millones de veces al día para ofrecer rutas a los vehículos en la red vial a nivel global. Sin embargo, debido al hecho de que la mayoría de los vehículos son propulsados por motores de combustión interna, estos algoritmos ignoran las consideraciones de repostaje.
Esto es debido a que las gasolineras suelen estar disponibles prácticamente en todos los lugares casi siempre sin necesitar realizar un gran desvío y porque el tiempo necesario para repostar suele ser de sólo unos minutos y resulta insignificante en comparación con el tiempo total de viaje.
¿Qué cambia con el coche eléctrico?
Esta situación es diferente para los coches eléctricos (BEV). En primer lugar, las estaciones de carga de vehículos eléctricos, lamentablemente, no son tan comunes aún como las gasolineras, lo que puede causar el fenómeno conocido como ansiedad por la autonomía, un temor a que la batería del automóvil se quede sin energía antes de llegar a una estación de carga.
Esta preocupación es lo suficientemente común como para ser considerada, por muchos, como una de las barreras para la adopción generalizada de vehículos eléctricos.
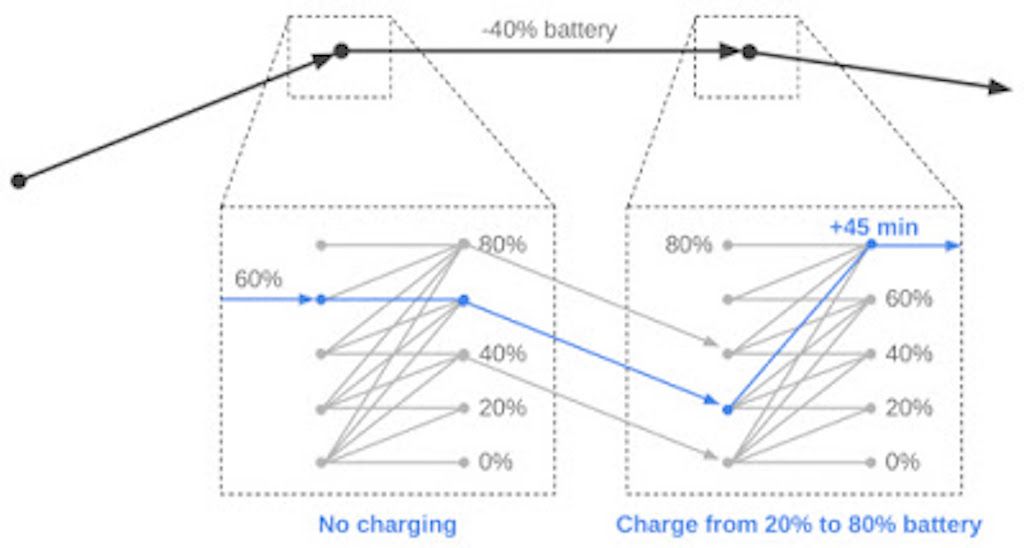
En segundo lugar, cargar la batería de un coche eléctrico es una tarea algo más exigente, porque el tiempo de carga puede ser una fracción significativa del tiempo total de viaje y puede variar ampliamente según la estación, el modelo de vehículo y el nivel de la batería.
Además, el tiempo de carga no es lineal, por ejemplo, se tarda más en cargar una batería del 90% al 100% que del 20% al 30%.
El nuevo cálculo de Google
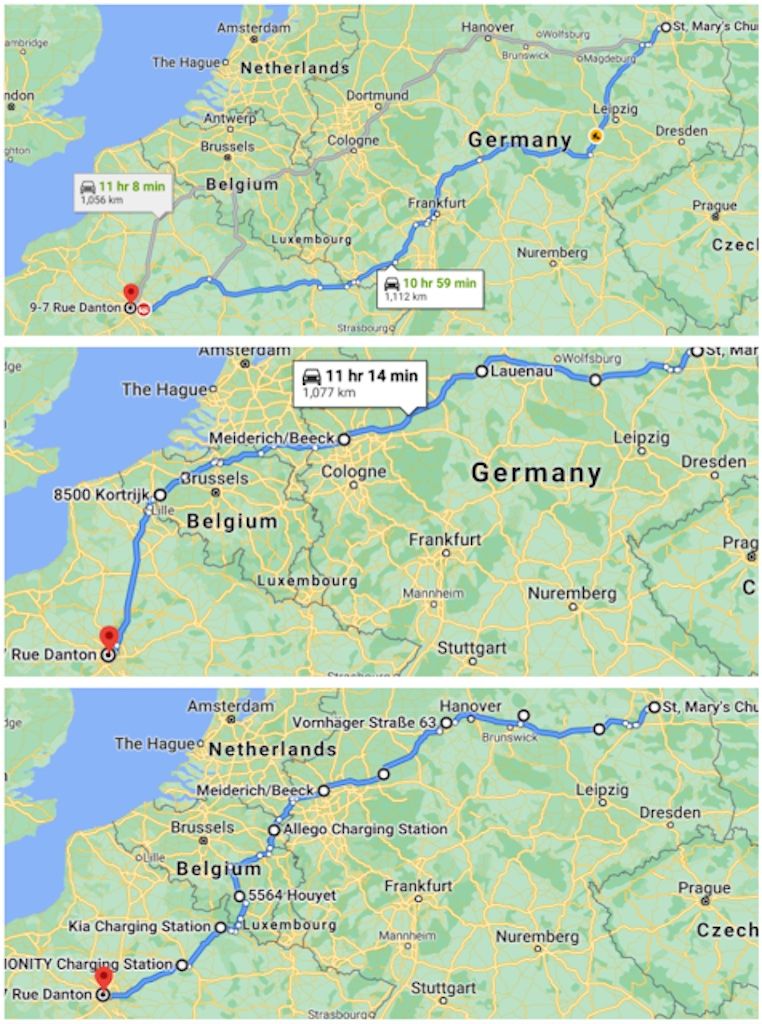
Google ha variado la forma de calcular las rutas que ofrece en su servicio de mapas adaptando este a las nuevas necesidades de los conductores de coches 100% eléctricos. El sistema ya está disponible en los vehículos que incorporan esta tecnología.
A partir de ahora en función del nivel de batería y el destino, Google Maps recomendará las paradas de carga y los niveles de carga correspondientes que minimizarán la duración total del viaje.
Para lograr esto, la compañía ha desarrollado una solución altamente escalable para recomendar rutas eficientes a través de estaciones de carga, que optimiza la suma del tiempo de conducción y el tiempo de carga.
Una ruta a través de una red de carga
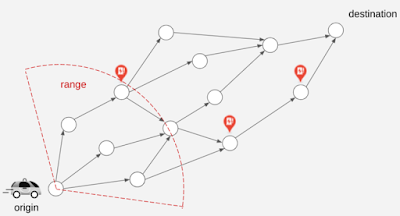
Una limitación fundamental en la selección de rutas es que la distancia entre las paradas de recarga no puede ser mayor que lo que el vehículo puede alcanzar con una carga completa.
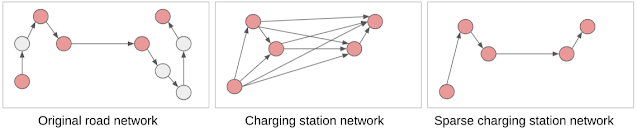
En consecuencia, el modelo de selección de rutas enfatiza el gráfico de estaciones de carga, a diferencia del gráfico de segmentos de carretera de la red de carreteras, donde cada estación de carga es un nodo y cada viaje entre estaciones de carga es un arista.
Teniendo en cuenta las diversas características de cada vehículo eléctrico (como el peso, el nivel máximo de batería, el tipo de enchufe, etc.), el algoritmo identifica cuáles de las aristas son factibles para el vehículo eléctrico en cuestión y cuáles no.
Una vez que llega la solicitud de cálculo de una ruta, la alternativa propuesta por Google Maps versión BEV, aumenta el gráfico factible con dos nuevos nodos, el origen y el destino, y con múltiples aristas nuevas que describen los viajes potenciales desde el origen a sus estaciones de carga cercanas y al destino desde cada una de sus estaciones de carga cercanas.
Algoritmos y gráficos
Para realizar las operaciones anteriores el algoritmo debe calcular el consumo de batería de cada viaje entre estaciones con precisión. Por esta razón, Google Maps mantiene información detallada sobre las características de la carretera a lo largo del viaje entre dos estaciones cualesquiera (por ejemplo, la longitud, elevación y pendiente, para cada segmento del viaje), teniendo en cuenta las propiedades de cada tipo de vehículo eléctrico.
Fuente | Google AI Blog

